Tours
Soccer Tour
South Wing / Asa Sul (A)
Início - Estandes Centrais
A RoboCup é uma competição internacional de destaque que reúne as melhores equipes do mundo para testar avanços em robótica e inteligência artificial. Realizada anualmente em diferentes países, como Tailândia, França e Holanda nos últimos anos, a RoboCup Internacional retorna ao Brasil pela primeira vez em 11 anos! Este tour guiará você por todas as categorias e competições da RoboCup.
Logo no salão principal de entrada, você encontrará os estandes dos nossos patrocinadores, incluindo grandes nomes como Unitree, Governo da Bahia, Finep, CEIA (UFG) e Khalifa University. Sinta-se à vontade para explorar o que eles têm a oferecer antes de prosseguir com este tour.
SPL - Standard Platform League
A Standard Platform League, ou SPL, é uma das ligas mais fascinantes da RoboCup porque todos os times competem utilizando exatamente o mesmo modelo de robô: o NAO, um humanoide de aproximadamente 60 cm, fabricado pela empresa Aldebaran. O grande diferencial dessa liga é que, como o hardware é padronizado para todos, o que realmente importa — e define os vencedores — é a qualidade dos algoritmos de software desenvolvidos por cada equipe.
Durante os jogos, os robôs devem jogar futebol de forma totalmente autônoma: caminhar, correr, localizar a bola, chutar, colaborar com os companheiros e se adaptar às estratégias do adversário — tudo sem qualquer controle humano. Isso exige um nível altíssimo de inteligência artificial, visão computacional, controle de movimento e cooperação entre robôs.
Os robôs NAO utilizam câmeras nos olhos para enxergar o campo e identificar a bola, os gols e os outros jogadores. Eles também precisam saber onde estão no campo a qualquer momento, o que envolve técnicas complexas de localização e mapeamento. Além disso, o jogo exige que os robôs se comuniquem entre si para coordenar jogadas, definir quem ataca, quem defende e quem se posiciona estrategicamente.
Embora os robôs sejam pequenos, os desafios são enormes. Manter o equilíbrio em tempo real, decidir para onde ir, reagir a imprevistos e colaborar com o time são tarefas que exigem um sistema inteligente muito bem desenvolvido. A SPL é, por isso, uma vitrine para a pesquisa em robótica autônoma e cooperação entre agentes robóticos.
Os avanços criados aqui podem ser aplicados em diversas áreas, como robôs de assistência pessoal, sistemas de monitoramento, mobilidade urbana e interação homem-máquina. A SPL mostra como é possível construir robôs inteligentes que entendem, decidem e agem por conta própria — habilidades que serão essenciais no dia a dia das tecnologias do futuro.
Mais Detalhes
Finais 2024: https://youtu.be/JgouDOhxld4?t=53
Introdução à RoboCup Standard Platform League
A RoboCup Standard Platform League (SPL) é uma liga única onde todas as equipes competem usando uma plataforma de robô idêntica. Atualmente, todos os robôs usados nesta liga são da plataforma NAO, um robô humanoide fabricado pela Aldebaran. O foco principal dessa liga é o desenvolvimento de algoritmos para robôs totalmente autônomos, com ênfase em habilidades como locomoção, percepção e interação em tempo real com o ambiente.
Objetivos da Competição
A SPL tem como objetivo promover pesquisas e avanços em robótica autônoma, especialmente em robôs humanoides. Embora todas as equipes usem o mesmo tipo de robô, elas desenvolvem seus próprios algoritmos e estratégias de controle, com o objetivo de criar robôs cada vez mais autônomos e inteligentes. Durante as partidas de futebol, os robôs devem correr, caminhar, chutar a bola e trabalhar em equipe, tudo de maneira autônoma, sem a ajuda de humanos.
Estrutura da Competição
Na SPL, os times competem em partidas de futebol, onde o objetivo é marcar o maior número de gols possível. Os robôs devem ser capazes de andar, correr e manter o equilíbrio enquanto jogam, além de realizar tarefas como chutar a bola e interagir com outros robôs do time adversário.
Cada equipe usa um robô NAO, o que garante que todos os robôs têm o mesmo ponto de partida. No entanto, as diferenças de desempenho vêm dos algoritmos desenvolvidos por cada time para controlar o robô de forma mais eficiente. Além das partidas de futebol, desafios técnicos também são realizados, como desafios de locomoção dinâmica, onde os robôs precisam demonstrar habilidades de equilíbrio e movimento em diferentes condições.
Desafios Técnicos e Pesquisas
Os desafios técnicos na SPL são intensos. Os robôs devem ser capazes de perceber o campo de futebol, identificar a bola, localizar-se no campo e manter o equilíbrio enquanto correm ou chutam a bola. Isso exige o uso avançado de sensores visuais, algoritmos de percepção e técnicas de inteligência artificial para que os robôs possam tomar decisões rápidas e precisas durante o jogo.
Além disso, o trabalho em equipe é fundamental. Os robôs devem se coordenar para atacar, defender e passar a bola de forma eficiente, o que envolve o desenvolvimento de estratégias de equipe e comunicação entre os robôs.
Impacto na Robótica e Inteligência Artificial
A SPL é uma plataforma de teste essencial para pesquisas em robótica autônoma e inteligência artificial. Os problemas enfrentados pelos robôs, como percepção visual, controle dinâmico de movimento e cooperação entre agentes, são extremamente desafiadores e oferecem um terreno fértil para novas descobertas tecnológicas. As soluções que surgem aqui têm o potencial de impactar várias indústrias, como robôs assistivos, carros autônomos e outras aplicações em automação.
Conclusão
A RoboCup Standard Platform League não é apenas uma competição de futebol entre robôs; é uma vitrine para o futuro da robótica autônoma. Ela fornece a pesquisadores e engenheiros uma plataforma única para desenvolver e testar novos algoritmos e tecnologias de controle que podem ser aplicadas em várias áreas da robótica. À medida que a SPL cresce, ela continua a impulsionar a evolução dos robôs humanoides, preparando-os para desempenhar tarefas cada vez mais complexas e relevantes no mundo real.
Humanoid Kid Size
Na categoria KidSize da RoboCup, os robôs humanoides têm entre 40 centímetros e 1 metro de altura e participam de partidas de futebol de forma totalmente autônoma. Eles não recebem comandos durante o jogo — tudo o que fazem, como andar, correr, chutar e se posicionar, é decidido por meio de inteligência artificial. O objetivo é imitar o comportamento de jogadores humanos em campo, tanto na movimentação quanto na tomada de decisões.
Cada robô é equipado com câmeras, sensores de movimento, acelerômetros e motores articulados, permitindo que perceba o ambiente, identifique a bola, localize os colegas, os adversários e o gol. Eles jogam em partidas com dois tempos de 10 minutos, onde precisam colaborar em equipe, tomar decisões estratégicas e se adaptar rapidamente às mudanças do jogo.
O maior desafio técnico da KidSize é o equilíbrio. Manter um robô de pé, correndo sobre duas pernas, com mudanças constantes de direção e velocidade, é extremamente difícil. Além disso, eles precisam identificar elementos visuais do campo e reagir em tempo real, algo que exige algoritmos avançados de visão computacional e controle motor. Essa categoria é fundamental para o avanço de tecnologias aplicáveis a robôs de assistência, educação e interação social no mundo real.
Mais Detalhes
Final 2024 – Japan vs Emirados Árabes https://youtu.be/pCLD93Uuzac
Introdução
A Liga Humanoide é um dos maiores destaques, onde robôs com características humanas jogam futebol. Eles são projetados para imitar a locomoção humana como caminhar, correr, chutar a bola e interagir com o ambiente de forma autônoma.
Você sabia que na RoboCup temos robôs que são pequenos como bebês? Eles são chamados de KidSize! Esses robôs jogam futebol, mas não precisam de ajuda de ninguém – eles fazem tudo sozinhos! Eles têm um tamanho parecido com o de crianças e são superinteligentes. São robôs que pensam e agem como se fossem jogadores de futebol de verdade! A altura máxima na categoria é de 1 metro e a mínima de 40 centímetros.
Como Funciona a Competição
Na competição da RoboCup, os robôs KidSize jogam futebol como um time. Eles têm que competir contra outras equipes de robôs e o objetivo é marcar gols! Mas, para fazer isso, eles têm que ser superinteligentes. Eles precisam perceber a bola, os outros robôs e o campo. E o mais legal: tudo é feito sem ajuda humana. Os robôs tomam decisões sozinhos, como se estivessem jogando um jogo de futebol com seus amigos.
Objetivo do Jogo
Cada jogo dura 20 minutos, com dois tempos de 10 minutos. Durante esse tempo, os robôs tentam marcar gols, defendem o próprio gol e passam a bola uns para os outros. O time que marcar mais gols vence! Mas a coisa não é tão fácil assim porque os robôs precisam se comunicar entre si e também perceber o que está acontecendo no campo.”
Características dos Robôs KidSize
Esses robôs têm braços e pernas que se movem como os humanos! Eles são programados para caminhar, correr e até chutar a bola. Mas, assim como vocês quando aprendem a andar de bicicleta, os robôs também têm que treinar muito para não cair e continuar jogando.
Tecnologia Análoga
Você já viu aqueles brinquedos que andam sozinhos ou aqueles carrinhos de controle remoto? Os robôs KidSize funcionam de uma maneira parecida, mas com um cérebro muito mais inteligente, porque eles têm sensores para ver o que está ao redor e tomar decisões rápidas e são totalmente autônomos!
Desafios dos Robôs KidSize
Os robôs KidSize têm que lidar com muitos desafios como andar sem cair, ver a bola e os outros jogadores, e ainda ter que chutar para o gol! Eles precisam ser muito rápidos e espertos, porque o jogo é muito dinâmico. Você sabia que, para um robô, se equilibrar e não cair é uma das coisas mais difíceis?
Tecnologia Análoga
É como quando você anda em um brinquedo de parque que gira ou balança, você tem que tentar não cair, não é? Os robôs também enfrentam isso, mas eles têm sensores e um computador dentro deles que ajudam a não cair!
Como Eles São Programados
Os robôs KidSize são programados para ver e entender tudo ao seu redor, como o campo, os outros robôs e a bola. Usando câmeras e sensores, eles podem tomar decisões rapidamente, como decidir quando chutar a bola ou correr atrás dela. Isso é como se fosse um superpoder de inteligência!
Tecnologia Análoga
Sabe os filtros do Instagram de cachorrinho ou gatinho? É uma inteligência artificial que identifica os pontos do rosto e inserem a máscara em cima dos pontos. Os robôs KidSize também usam inteligência artificial para entender o que está acontecendo no campo.
Humanoid Adult
A categoria AdultSize é uma das mais impressionantes da RoboCup. Aqui, os robôs têm entre 1 e 2 metros de altura e enfrentam desafios ainda mais complexos. O tamanho maior significa que qualquer movimento, como andar ou chutar uma bola, exige muito mais controle e precisão para manter o equilíbrio e evitar quedas. Assim como na KidSize, os robôs jogam futebol de forma autônoma, tomando todas as decisões por conta própria.
Por serem maiores, os robôs AdultSize precisam de motores mais potentes, sensores de estabilidade refinados e algoritmos mais robustos de locomoção. Um conceito importante aqui é o do pêndulo invertido: como uma vassoura equilibrada na mão, o corpo do robô está sempre em risco de cair, e ele precisa fazer constantes ajustes para se manter em pé — enquanto se move, interage com outros robôs e tenta marcar gols.
Além do jogo em si, esses robôs são verdadeiros laboratórios móveis de pesquisa em robótica avançada. Eles lidam com percepção do ambiente, planejamento de trajetórias e cooperação com outros robôs em tempo real. As tecnologias testadas nessa categoria têm aplicação direta em áreas como robôs de resgate, assistência médica, veículos autônomos e outras soluções industriais onde o equilíbrio, a autonomia e a interação segura são fundamentais.
Mais Detalhes
Finais 2024: https://youtu.be/0-g01n3lm80
Introdução à RoboCup e Liga Humanoide AdultSize
Na RoboCup, além dos robôs KidSize, temos também a categoria AdultSize, onde os robôs são mais avançados e maiores. Eles têm uma estrutura mais parecida com os adultos e são projetados para lidar com desafios mais complexos. Essa liga é onde as pesquisas de ponta em robótica e inteligência artificial acontecem, e os robôs enfrentam desafios que exigem muita precisão e destreza. A altura máxima na categoria é de 2 metros e a mínima de 1 metro.
Tecnologia Análoga
Esse tipo de robô é como um carro autônomo, que precisa tomar decisões rápidas ao dirigir sem ajuda de humanos. Ou como um Pêndulo invertido, conceito muito abordado na engenharia, tem que manter a estabilidade para não cair. Um pêndulo invertido é como uma vassoura equilibrada na ponta do seu dedo. Normalmente, se você coloca uma vassoura em pé no chão, ela fica parada. Mas se você tentar equilibrar ela de ponta cabeça na palma da sua mão, ela quer cair, né? Aí você precisa mover a mão bem rápido para o lado certo pra ela não cair. Ou como uma pessoa tentando se equilibrar em uma moto, ela tem que se mover para manter o equilíbrio. O robô tem sensores que percebem quando ele está começando a tombar, e calculam como se mexer para manter o equilíbrio. Ele está sempre tentando manter o “pêndulo” (o corpo dele) em pé, mesmo sendo algo naturalmente instável.
Como Funciona a Competição
Na competição de AdultSize, os robôs enfrentam os mesmos desafios que os robôs KidSize, mas com um nível mais avançado. Eles são maiores e precisam tomar decisões ainda mais complexas, já que seus movimentos exigem mais precisão e estabilidade devido ao tamanho.
Objetivo do Jogo
Assim como na categoria KidSize, o jogo é dividido em dois tempos de 10 minutos. Os robôs precisam marcar gols, defender a meta e interagir como um time. A diferença é que os robôs AdultSize são maiores e têm que lidar com questões de equilíbrio mais complexas, sem perder velocidade e precisão.
Características dos Robôs AdultSize
Os robôs AdultSize são maiores, mais poderosos e podem realizar movimentos mais complexos. Eles são projetados para manter o equilíbrio e para chutar a bola de forma a não cair. Esses robôs enfrentam desafios ainda maiores, porque o tamanho e o peso deles fazem com que os movimentos sejam mais difíceis de controlar.
Desafios e Avanços Tecnológicos
Os robôs AdultSize enfrentam desafios em áreas como locomoção dinâmica, equilíbrio, percepção do ambiente e tomada de decisões em tempo real. Eles precisam entender e reagir ao que está acontecendo no campo de futebol, o que exige um nível avançado de percepção visual e de controle de movimento.
Tecnologia Análoga
Pense em um sistema de câmeras que você usa em seu carro para estacionar. Elas ajudam a detectar onde estão os objetos ao redor. Agora, imagine que um robô AdultSize usa câmeras e sensores semelhantes para enxergar o campo e os outros robôs, fazendo ajustes rápidos enquanto joga.
Importância da Pesquisa em Robótica e Inteligência Artificial
A RoboCup, especialmente na categoria AdultSize, é uma plataforma onde as pesquisas em robótica, inteligência artificial e aprendizado de máquina avançam rapidamente. As inovações desenvolvidas aqui podem ser aplicadas em diversas áreas, como carros autônomos, robôs para cirurgias, e até sistemas de segurança. A competição exige que os robôs sejam autônomos, inteligentes e capazes de realizar tarefas complexas sem intervenção humana.
Tecnologia Análoga
Esses robôs são como um assistente inteligente avançado, parecido com os que vemos em sistemas de automação doméstica. Eles não só fazem o que pedimos, mas também aprendem e se adaptam ao ambiente de forma autônoma.
Small Size League
A Small Size League (SSL) é uma das ligas mais rápidas e estratégicas da RoboCup. Os robôs são bem pequenos — cada um precisa caber em um cilindro de 18 cm de diâmetro por 15 cm de altura — mas isso não os impede de jogar futebol com altíssima agilidade e precisão. As partidas acontecem com equipes de até 11 robôs, usando uma bola de golfe laranja.
O grande diferencial da SSL é o sistema de visão centralizada, com câmeras posicionadas acima do campo, que rastreiam todos os robôs e a bola em tempo real. Essas informações são enviadas a um computador externo que processa tudo rapidamente e envia comandos aos robôs por rádio. Apesar de o hardware ser pequeno, o poder de decisão e estratégia está no software desenvolvido por cada equipe.
A competição exige planejamento tático, resposta rápida e cooperação entre os robôs. Cada equipe precisa programar seus robôs para decidir quando atacar, defender, passar ou interceptar a bola. A coordenação multiagente — ou seja, vários robôs trabalhando juntos com objetivos comuns — é um dos maiores desafios da SSL.
Essa liga serve como um campo de testes ideal para aplicações em logística, veículos autônomos e sistemas de automação inteligente. Mesmo com robôs tão pequenos, a complexidade das decisões e a velocidade do jogo tornam a SSL uma das modalidades mais tecnológicas e impressionantes da RoboCup.
Mais Detalhes
Final 2016: https://youtu.be/ejPRlJ3W7aU
O robô deve caber em um cilindro de 18cm de diâmetro e 15cm de altura.
Introdução à SSL
Agora, vamos falar sobre a Liga SSL ( Small size league – Liga de Tamanho Pequeno), uma das ligas mais tradicionais da RoboCup, focada na coordenação multiagente inteligente. Diferente da MSL, aqui as equipes competem com robôs menores, construídos para jogar futebol em um ambiente dinâmico. Cada time é composto por 11 robôs (ou 6 robôs na divisão B), jogando com uma bola de golfe laranja.
Estrutura do Jogo e Regras
As equipes competem em partidas de futebol 11 contra 11 (ou 6 contra 6 para as equipes da divisão B), com um sistema de visão centralizada, chamado SSL-Vision (que fica acima do campo), que rastreia todos os objetos no campo, incluindo a bola e os robôs. Esse sistema permite uma visão do jogo para todos os participantes e facilita a coordenação das equipes.
Cada equipe utiliza computadores externos para processar as informações necessárias e enviar comandos para os robôs, que operam de forma autônoma no campo. A comunicação entre os robôs e o sistema de controle é feita sem fio, usando unidades de transmissão e recepção de rádio comerciais.
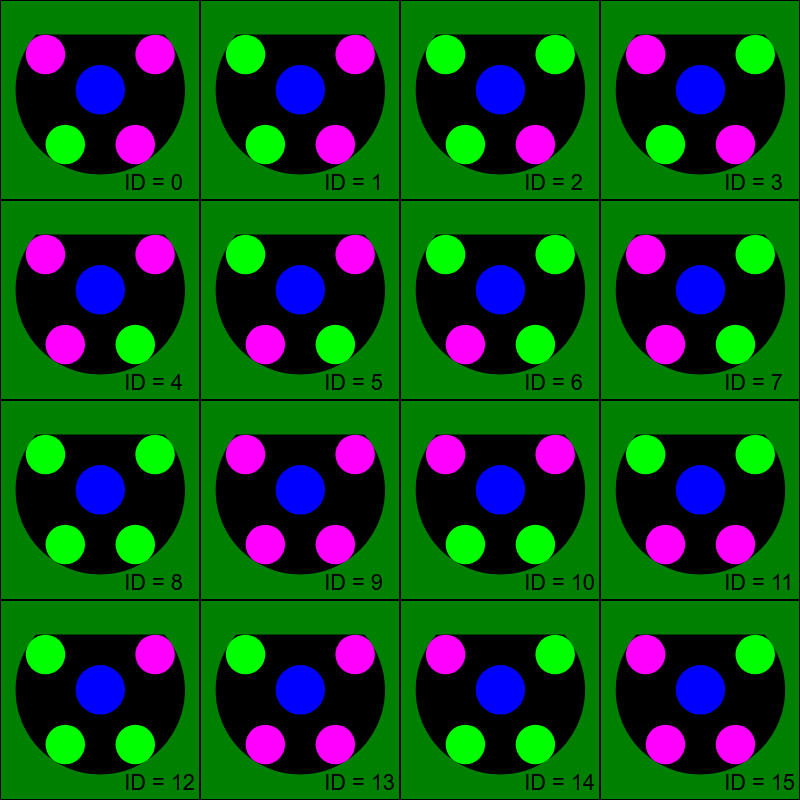
As cores são utilizadas para identificação
Tecnologia e Desafios Técnicos
Na SSL, o maior desafio é a coordenação e o controle multiagente. Como os robôs precisam trabalhar em conjunto para atacar, defender e passar a bola de forma eficaz, a inteligência artificial desempenha um papel fundamental no planejamento tático e nas ações coordenadas durante o jogo. Cada robô tem sua própria percepção do campo, mas todos devem seguir uma estratégia compartilhada.
Os robôs são pequenos e rápidos, o que significa que o jogo é muito dinâmico. A comunicação rápida e a capacidade de tomar decisões em frações de segundo são essenciais para o sucesso de cada equipe.
Impacto da SSL e Inovações Tecnológicas
A SSL não só traz desafios para os robôs no campo, mas também impulsiona o avanço de tecnologias aplicadas a inteligência coletiva, processamento de dados em tempo real e sistemas autônomos. As inovações que surgem dessa liga têm grande potencial de aplicação em várias áreas da tecnologia, como veículos autônomos, sistemas de monitoramento e até mesmo robôs para missões de resgate.
Conclusão SSL
A RoboCup SSL é uma vitrine importante para a pesquisa em coordenação multiagente e inteligência artificial. Ao unir esses robôs rápidos e ágeis, a liga desafia as equipes a desenvolver soluções inovadoras que podem, futuramente, ser aplicadas em diversas indústrias, como na automação, na segurança e até na medicina.
Soccer Simulation League
A Soccer Simulation League se concentra em desenvolver inteligência artificial, sistemas multiagentes e estratégia de equipe em um ambiente de futebol totalmente virtual. É uma plataforma segura e acessível, perfeita para pesquisadores e estudantes testarem algoritmos avançados de IA sem precisar de robôs físicos. As soluções criadas aqui têm aplicações reais muito além do campo de futebol, como na coordenação de múltiplos robôs para logística ou resposta a desastres.
A liga é dividida em duas subligas principais:
Primeiro, temos a RoboCup Soccer Simulation 2D League. Nela, duas equipes de onze programas de software autônomos, ou “agentes”, jogam futebol em um estádio virtual 2D. Um servidor central gerencia o jogo e a física. O grande desafio para cada agente é tomar decisões inteligentes a partir de dados sensoriais incompletos e ruidosos, tudo em apenas 100 milissegundos por ciclo de jogo! Isso a torna um ótimo campo de testes para aprendizado de máquina e tomada de decisão estratégica sob incerteza.
Em seguida, a RoboCup Soccer Simulation 3D League eleva o realismo, adicionando uma terceira dimensão e física mais complexa. Aqui, os agentes controlam robôs humanoides virtuais, como o modelo “Nao”, em partidas de futebol. O foco mudou do comportamento estratégico para o controle de baixo nível desses robôs: como eles andam, chutam, giram e se levantam. É um ambiente robusto para testar coordenação multi-robô, locomoção avançada e equilíbrio dinâmico de humanoides sem a necessidade de hardware caro.
Ambas as ligas impulsionam pesquisas cruciais em sistemas multiagentes, inteligência artificial, controle robótico, fusão de sensores e aprendizado por reforço. As inovações daqui têm grande impacto na indústria e na sociedade, influenciando o desenvolvimento de sistemas autônomos para veículos, automação em fábricas, robôs de resgate e a interação humano-robô.
Em resumo, a RoboCup Soccer Simulation League é um motor de inovação em IA e robótica. Ela permite que estudantes e pesquisadores explorem os limites do que agentes de software autônomos podem fazer, contribuindo fundamentalmente para trazer a inteligência artificial para o nosso dia a dia.
Mais Detalhes
Introdução à RoboCup Soccer Simulation League
A RoboCup Soccer Simulation League é uma das primeiras ligas da RoboCup, focando no desenvolvimento de inteligência artificial, sistemas multi-agentes e estratégia de equipe em um ambiente de futebol virtual. Ela oferece uma plataforma segura, acessível e altamente realista para pesquisadores e estudantes experimentarem algoritmos avançados de IA e controle robótico sem a necessidade de hardware físico. Esta liga é crucial para impulsionar os limites da IA, já que as soluções desenvolvidas aqui podem ser aplicadas em cenários do mundo real além do futebol, como coordenação complexa de múltiplos robôs, planejamento autônomo para várias tarefas e até mesmo em áreas como logística ou resposta a desastres.
A liga é dividida em duas subligas principais:
RoboCup Soccer Simulation 2D League
A Liga de Simulação 2D é uma das ligas mais antigas e estabelecidas da RoboCup Soccer. Nesta modalidade, duas equipes, cada uma composta por onze programas de software autônomos (chamados agentes), competem em um estádio de futebol virtual bidimensional representado por um servidor central, chamado SoccerServer. Este servidor sabe tudo sobre o jogo, incluindo a posição atual de todos os jogadores e da bola, a física e assim por diante. O jogo depende da comunicação entre o servidor e cada agente. Cada jogador recebe entradas relativas e ruidosas de seus sensores virtuais (visuais, acústicos e físicos) e pode realizar comandos básicos (como avançar, girar ou chutar) para influenciar seu ambiente.
O desafio central na liga 2D reside na inferência inteligente da melhor ação possível a partir de dados de sensores incompletos e ruidosos dentro de um limite de tempo rigoroso de 100 ms por ciclo de jogo. Isso a torna um excelente campo de testes para pesquisa em sistemas multi-agentes, inteligência artificial e aprendizado de máquina, particularmente em áreas como modelagem de mundo e tomada de decisão estratégica sob incerteza.
RoboCup Soccer Simulation 3D League
A Liga de Simulação 3D aumenta significativamente o realismo do ambiente simulado ao adicionar uma terceira dimensão e física mais complexa. Esta liga desafia agentes de software a controlar robôs humanoides, como o modelo de robô Nao (atualmente utilizado), para competir em partidas de futebol em um mundo virtual detalhado.
Inicialmente, a liga 3D focava em mobilidade básica e equilíbrio, já que os primeiros modelos de robôs eram mais simples. No entanto, com a introdução de modelos humanoides mais complexos, a ênfase mudou para o controle de baixo nível desses robôs e a criação de comportamentos fundamentais como andar, chutar, girar e levantar. Os robôs na simulação 3D são equipados com vários sensores virtuais, incluindo giroscópios, acelerômetros, perceptores de junta articulada, perceptores de resistência à força e perceptores de visão (câmera), para perceber seu ambiente e outros jogadores. Eles também possuem efetores para controlar seus movimentos e ações.
A liga 3D fornece uma plataforma robusta para experimentar o controle de robôs humanoides sem a necessidade de hardware físico caro. É um ambiente vital para pesquisa em metodologias de coordenação multi-robô, locomoção avançada, equilíbrio dinâmico e comportamentos baseados em visão complexos para robôs humanoides. As soluções desenvolvidas aqui contribuem diretamente para o objetivo de longo prazo de criar robôs humanoides totalmente autônomos capazes de realizar tarefas físicas complexas em cenários do mundo real.
Áreas de Pesquisa e Desenvolvimento
Ambas as Ligas de Simulação (2D e 3D) contribuem para áreas chave da pesquisa em robótica e inteligência artificial:
Sistemas Multi-agentes: Desenvolvimento de comportamentos coordenados entre múltiplas entidades autônomas.
Inteligência Artificial: Implementação de algoritmos avançados de tomada de decisão, aprendizado e planejamento estratégico.
Controle Robótico: Para 3D, focando no controle de baixo nível e equilíbrio de robôs humanoides.
Fusão de Sensores e Percepção: Gerenciamento de dados de sensores ruidosos e incompletos para construir uma compreensão coerente do ambiente.
Aprendizado por Reforço: Treinamento de agentes para aprender comportamentos ideais por meio de tentativa e erro em ambientes dinâmicos complexos.
Importância para a Indústria e Sociedade
A RoboCup Soccer Simulation League serve como um campo de testes crucial para avanços teóricos em IA e robótica. Os conhecimentos obtidos e as tecnologias desenvolvidas nesses ambientes virtuais têm ampla aplicabilidade, influenciando áreas como:
Sistemas Autônomos: Desenvolvimento de controle inteligente para veículos autônomos e drones.
Logística e Automação: Otimização de sistemas multi-robô em armazéns e fábricas.
Resposta a Desastres: Projetar equipes de robôs coordenados para operações de busca e resgate em áreas perigosas ou inacessíveis.
Interação Humano-Robô: Embora menos direta do que a RoboCup@Home, a coordenação multi-agente pode informar futuras dinâmicas de equipes humano-robô.
Conclusão e Impacto Futuro
A RoboCup Soccer Simulation League é mais do que apenas uma competição; é uma força motriz para a inovação em inteligência artificial e robótica. Ao fornecer uma plataforma desafiadora, porém segura, ela permite que pesquisadores e estudantes impulsionem os limites do que agentes de software autônomos podem alcançar. Os avanços feitos nas subligas 2D e 3D são fundamentais para concretizar o potencial da IA na resolução de problemas complexos do mundo real e aproximar os sistemas autônomos inteligentes da vida cotidiana.
Start - Middle Stands
RoboCup is a prominent international competition that brings together the best teams from around the world to test advancements in robotics and artificial intelligence. Held annually in different countries, such as Thailand, France, and the Netherlands in recent years, the International RoboCup returns to Brazil for the first time in 11 years! This tour will guide you through all of RoboCup’s categories and competitions.
Right in the main entrance hall, you will find the stands of our sponsors, including big names like Unitree, Government of Bahia, Finep, CEIA, and Khalifa University. Feel free to explore what they have to offer before continuing with this tour.
SPL - Standard Platform League
The Standard Platform League, or SPL, is one of RoboCup’s most fascinating leagues because all teams compete using exactly the same robot model: the NAO, a humanoid approximately 60 cm tall, manufactured by Aldebaran. The great differentiator of this league is that, since the hardware is standardized for everyone, what truly matters—and defines the winners—is the quality of the software algorithms developed by each team.
During the games, the robots must play soccer completely autonomously: walk, run, locate the ball, kick, collaborate with teammates, and adapt to the opponent’s strategies—all without any human control. This demands a very high level of artificial intelligence, computer vision, motion control, and cooperation among robots.
The NAO robots use cameras in their eyes to see the field and identify the ball, goals, and other players. They also need to know where they are on the field at all times, which involves complex localization and mapping techniques. Furthermore, the game requires robots to communicate with each other to coordinate plays, decide who attacks, who defends, and who positions themselves strategically.
Although the robots are small, the challenges are enormous. Maintaining balance in real-time, deciding where to go, reacting to unforeseen events, and collaborating with the team are tasks that require a very well-developed intelligent system. The SPL is, therefore, a showcase for research in autonomous robotics and cooperation among robotic agents.
The advancements created here can be applied in various areas, such as personal assistance robots, monitoring systems, urban mobility, and human-machine interaction. The SPL shows how it is possible to build intelligent robots that understand, decide, and act on their own—skills that will be essential in the daily technologies of the future.
Additional Information
2024 Finals: RoboCup 2024 Final – HTWK Robots vs. B-Human (Standard Platform League)
Introduction
The RoboCup Standard Platform League (SPL) is a unique league where all teams compete using an identical robot platform. Currently, all robots used in this league are from the NAO platform, a humanoid robot manufactured by Aldebaran. The primary focus of this league is the development of algorithms for fully autonomous robots, with an emphasis on skills such as locomotion, perception, and real-time interaction with the environment.
Competition Objectives
The SPL aims to promote research and advancements in autonomous robotics, especially in humanoid robots. Although all teams use the same type of robot, they develop their own algorithms and control strategies, with the goal of creating increasingly autonomous and intelligent robots. During soccer matches, the robots must run, walk, kick the ball, and work as a team, all autonomously, without human assistance.
Competition Structure
In the SPL, teams compete in soccer matches, where the objective is to score as many goals as possible. Robots must be able to walk, run, and maintain balance while playing, in addition to performing tasks such as kicking the ball and interacting with other robots on the opposing team.
Each team uses a NAO robot, which ensures that all robots have the same starting point. However, the differences in performance come from the algorithms developed by each team to control the robot more efficiently. In addition to soccer matches, technical challenges are also held, such as dynamic locomotion challenges, where robots need to demonstrate balance and movement skills under different conditions.
Technical Challenges and Research
The technical challenges in the SPL are intense. Robots must be able to perceive the soccer field, identify the ball, localize themselves on the field, and maintain balance while running or kicking the ball. This requires the advanced use of visual sensors, perception algorithms, and artificial intelligence techniques so that robots can take quick and precise decisions during the game.
Furthermore, teamwork is fundamental. Robots must coordinate to attack, defend, and pass the ball efficiently, which involves the development of team strategies and communication between the robots.
Impact on Robotics and Artificial Intelligence
The SPL is an essential testing platform for research in autonomous robotics and artificial intelligence. The problems faced by robots, such as visual perception, dynamic motion control, and cooperation among agents, are extremely challenging and offer a fertile ground for new technological discoveries. The solutions that emerge here have the potential to impact various industries, such as assistive robots, autonomous cars, and other applications in automation.
Conclusion
The RoboCup Standard Platform League is not just a soccer competition between robots; it is a showcase for the future of autonomous robotics. It provides researchers and engineers with a unique platform to develop and test new algorithms and control technologies that can be applied in various areas of robotics. As the SPL grows, it continues to drive the evolution of humanoid robots, preparing them to perform increasingly complex and relevant tasks in the real world.
Humanoid Kid Size
In the RoboCup KidSize category, humanoid robots range from 40 centimeters to 1 meter in height and participate in soccer matches completely autonomously. They do not receive commands during the game—everything they do, such as walking, running, kicking, and positioning themselves, is decided by artificial intelligence. The goal is to imitate the behavior of human players on the field, both in movement and decision-making.
Each robot is equipped with cameras, motion sensors, accelerometers, and articulated motors, allowing it to perceive the environment, identify the ball, locate teammates, opponents, and the goal. They play in matches with two 10-minute halves, where they must collaborate as a team, make strategic decisions, and quickly adapt to changes in the game.
The biggest technical challenge in KidSize is balance. Keeping a robot standing, running on two legs, with constant changes in direction and speed, is extremely difficult. Furthermore, they need to identify visual elements on the field and react in real-time, which requires advanced computer vision and motor control algorithms. This category is fundamental for the advancement of technologies applicable to assistance, education, and social interaction robots in the real world.
Additional Information
Final 2024 – Japan vs United Arab Emirates RC24.1 RoboCup 2024 Final – Humanoid Soccer KidSize – CIT Brains (Japan) vs KURA (UAE)
Introduction
The Humanoid League is one of the biggest highlights, where robots with human characteristics play soccer. They are designed to imitate human locomotion such as walking, running, kicking the ball, and interacting with the environment autonomously.
Did you know that in RoboCup we have robots that are small like babies? They are called KidSize! These robots play soccer, but they don’t need anyone’s help – they do everything by themselves! They are about the size of children and are super intelligent. They are robots that think and act as if they were real soccer players! The maximum height in this category is 1 meter and the minimum is 40 centimeters.
How the Competition Works
In the RoboCup competition, KidSize robots play soccer as a team. They have to compete against other robot teams, and the goal is to score goals! But to do that, they have to be super intelligent. They need to perceive the ball, other robots, and the field. And the coolest thing: everything is done without human help. The robots make decisions on their own, just like they are playing a soccer game with their friends.
Game Objective
Each game lasts 20 minutes, with two 10-minute halves. During this time, the robots try to score goals, defend their own goal, and pass the ball to each other. The team that scores the most goals wins! But it’s not that easy because the robots need to communicate with each other and also perceive what is happening on the field.
KidSize Robot Characteristics
These robots have arms and legs that move like humans! They are programmed to walk, run, and even kick the ball. But, just like you when you learn to ride a bicycle, robots also have to train a lot not to fall and to keep playing.
Analogous Technology
Have you ever seen those toys that walk by themselves or those remote-controlled cars? KidSize robots work in a similar way, but with a much more intelligent brain, because they have sensors to see what is around them and make quick decisions, and they are completely autonomous!
KidSize Robot Challenges
KidSize robots have to deal with many challenges like walking without falling, seeing the ball and other players, and still having to kick towards the goal! They need to be very fast and smart, because the game is very dynamic. Did you know that, for a robot, balancing and not falling is one of the most difficult things?
Analogous Technology
It’s like when you ride a spinning or rocking amusement park ride, you have to try not to fall, right? Robots also face this, but they have sensors and a computer inside them that help them not to fall!
How They Are Programmed
KidSize robots are programmed to see and understand everything around them, like the field, other robots, and the ball. Using cameras and sensors, they can make decisions quickly, like deciding when to kick the ball or run after it. This is like a superpower of intelligence!
Analogous Technology
You know those dog or cat filters on Instagram? It’s an artificial intelligence that identifies points on your face and inserts the mask on top of those points. KidSize robots also use artificial intelligence to understand what is happening on the field.
Humanoid Adult
The AdultSize category is one of the most impressive at RoboCup. Here, robots are between 1 and 2 meters tall and face even more complex challenges. The larger size means that any movement, such as walking or kicking a ball, requires much more control and precision to maintain balance and avoid falls. Similar to the KidSize category, these robots play soccer autonomously, making all decisions on their own.
Because they are larger, AdultSize robots need more powerful motors, refined stability sensors, and more robust locomotion algorithms. An important concept here is that of the inverted pendulum: like a broom balanced in one’s hand, the robot’s body is always at risk of falling, and it needs to make constant adjustments to stay upright—while moving, interacting with other robots, and trying to score goals.
Beyond the game itself, these robots are true mobile laboratories for advanced robotics research. They deal with environmental perception, trajectory planning, and real-time cooperation with other robots. The technologies tested in this category have direct application in areas such as rescue robots, medical assistance, autonomous vehicles, and other industrial solutions where balance, autonomy, and safe interaction are fundamental.
Additional Information
2024 Finals: RoboCup 2024: Team RoMeLa Finals, Humanoid AdultSize LeagueRoboCup 2024 Finals
Introduction to RoboCup and the Humanoid AdultSize League
At RoboCup, in addition to KidSize robots, we also have the AdultSize category, where robots are more advanced and larger. They have a structure more similar to adults and are designed to handle more complex challenges. This league is where cutting-edge research in robotics and artificial intelligence takes place, and the robots face challenges that demand high precision and dexterity. The maximum height in this category is 2 meters and the minimum is 1 meter.
Analogous Technology
This type of robot is like an autonomous car that needs to make quick decisions while driving without human help. Or like an inverted pendulum, a concept widely discussed in engineering, which must maintain stability to avoid falling. An inverted pendulum is like a broom balanced on your fingertip. Normally, if you stand a broom upright on the floor, it stays put. But if you try to balance it upside down on the palm of your hand, it wants to fall, right? Then you need to move your hand quickly to the correct side so it doesn’t fall. Or like a person trying to balance on a motorcycle, they have to move to maintain balance. The robot has sensors that detect when it’s starting to tip over and calculate how to move to maintain balance. It is always trying to keep its “pendulum” (its body) upright, even though it is naturally unstable.
How the Competition Works
In the AdultSize competition, robots face the same challenges as KidSize robots, but at a more advanced level. They are larger and need to make even more complex decisions, as their movements require greater precision and stability due to their size.
Game Objective
Similar to the KidSize category, the game is divided into two 10-minute halves. The robots need to score goals, defend their goal, and interact as a team. The difference is that AdultSize robots are larger and have to deal with more complex balance issues, without losing speed and precision.
AdultSize Robot Characteristics
AdultSize robots are larger, more powerful, and can perform more complex movements. They are designed to maintain balance and to kick the ball without falling. These robots face even greater challenges because their size and weight make their movements harder to control.
Challenges and Technological Advancements
AdultSize robots face challenges in areas such as dynamic locomotion, balance, environmental perception, and real-time decision-making. They need to understand and react to what is happening on the soccer field, which requires an advanced level of visual perception and motion control.
Analogous Technology
Think of a camera system you use in your car for parking. They help detect where objects are around you. Now, imagine an AdultSize robot uses similar cameras and sensors to see the field and other robots, making quick adjustments while playing.
Importance of Research in Robotics and Artificial Intelligence
RoboCup, especially in the AdultSize category, is a platform where research in robotics, artificial intelligence, and machine learning advances rapidly. The innovations developed here can be applied in various areas, such as autonomous cars, surgical robots, and even security systems. The competition requires robots to be autonomous, intelligent, and capable of performing complex tasks without human intervention.
Analogous Technology
These robots are like advanced smart assistants, similar to those we see in home automation systems. They not only do what we ask but also learn and adapt to the environment autonomously.
Small Size League
The Small Size League (SSL) is one of the fastest and most strategic leagues at RoboCup. The robots are very small—each must fit within an 18 cm diameter by 15 cm high cylinder—but this doesn’t stop them from playing soccer with very high agility and precision. Matches take place with teams of up to 11 robots, using an orange golf ball.
The main differential of SSL is the centralized vision system, with cameras positioned above the field that track all robots and the ball in real-time. This information is sent to an external computer that processes everything quickly and sends commands to the robots via radio. Although the hardware is small, the decision-making and strategic power lie in the software developed by each team.
The competition demands tactical planning, quick response, and cooperation among the robots. Each team must program its robots to decide when to attack, defend, pass, or intercept the ball. Multi-agent coordination—that is, several robots working together with common goals—is one of the biggest challenges in SSL.
This league serves as an ideal testing ground for applications in logistics, autonomous vehicles, and intelligent automation systems. Even with such small robots, the complexity of decisions and the speed of the game make SSL one of the most technological and impressive modalities of RoboCup.
Additional Information
2016 Final: Small Size League | RoboCup Soccer (2016)
The robot must fit in a cylinder 18cm in diameter and 15cm in height.
Introduction to SSL
Now, let’s talk about the SSL League (Small Size League), one of RoboCup’s most traditional leagues, focused on intelligent multi-agent coordination. Unlike MSL, here teams compete with smaller robots, built to play soccer in a dynamic environment. Each team is composed of 11 robots (or 6 robots in division B), playing with an orange golf ball.
Game Structure and Rules
Teams compete in 11-on-11 soccer matches (or 6-on-6 for Division B teams), with a centralized vision system, called SSL-Vision (located above the field), that tracks all objects on the field, including the ball and the robots. This system provides a game overview for all participants and facilitates team coordination.
Each team uses external computers to process the necessary information and send commands to the robots, which operate autonomously on the field. Communication between the robots and the control system is wireless, using commercial radio transmission and reception units.
Colors are used for identification.
Technology and Technical Challenges
In SSL, the biggest challenge is multi-agent coordination and control. As robots need to work together to attack, defend, and pass the ball effectively, artificial intelligence plays a fundamental role in tactical planning and coordinated actions during the game. Each robot has its own perception of the field, but all must follow a shared strategy.
The robots are small and fast, which means the game is very dynamic. Fast communication and the ability to make split-second decisions are essential for each team’s success.
Impact of SSL and Technological Innovations
SSL not only brings challenges for robots on the field but also drives the advancement of technologies applied to collective intelligence, real-time data processing, and autonomous systems. The innovations that emerge from this league have great potential for application in various areas of technology, such as autonomous vehicles, monitoring systems, and even robots for rescue missions.
SSL Conclusion
RoboCup SSL is an important showcase for research in multi-agent coordination and artificial intelligence. By bringing together these fast and agile robots, the league challenges teams to develop innovative solutions that can, in the future, be applied in various industries, such as automation, security, and even medicine.
Soccer Simulation League
The Soccer Simulation League focuses on developing artificial intelligence, multi-agent systems, and team strategy within a completely virtual soccer environment. It’s a safe and accessible platform, perfect for researchers and students to test advanced AI algorithms without needing physical robots. The solutions created here have real-world applications far beyond the soccer field, such as coordinating multiple robots for logistics or disaster response.
The league is divided into two main sub-leagues:
First, we have the RoboCup Soccer Simulation 2D League. Here, two teams of eleven autonomous software programs, or “agents,” play soccer in a 2D virtual stadium. A central server manages the game and its physics. The big challenge for each agent is to make intelligent decisions from incomplete and noisy sensor data, all within a strict 100-millisecond time slot per game cycle! This makes it an excellent testbed for machine learning and strategic decision-making under uncertainty.
Next, the RoboCup Soccer Simulation 3D League elevates realism by adding a third dimension and more complex physics. Here, agents control virtual humanoid robots, like the Nao model, in soccer matches. The focus shifted from strategic behavior to the low-level control of these robots: how they walk, kick, turn, and stand up. It’s a robust environment for testing multi-robot coordination, advanced locomotion, and dynamic balance for humanoids without the need for expensive hardware.
Both leagues drive crucial research in multi-agent systems, artificial intelligence, robotic control, sensor fusion, and reinforcement learning. The innovations from here have a significant impact on industry and society, influencing the development of autonomous systems for vehicles, automation in factories, rescue robots, and human-robot interaction.
In short, the RoboCup Soccer Simulation League is a driving force for innovation in AI and robotics. It allows students and researchers to explore the limits of what autonomous software agents can do, fundamentally contributing to bringing artificial intelligence into our daily lives.
Additional Information
Introduction to RoboCup Soccer Simulation League
The RoboCup Soccer Simulation League is one of the first leagues of RoboCup, focusing on the development of artificial intelligence, multi-agent systems, and team strategy within a virtual soccer environment. It provides a safe, accessible, and highly realistic platform for researchers and students to experiment with advanced AI algorithms and robotic control without the need for physical hardware. This league is crucial for pushing the boundaries of AI, as the solutions developed here can be applied to real-world scenarios beyond soccer, such as complex multi-robot coordination, autonomous planning for various tasks, and even in areas like logistics or disaster response.
The league is divided into two main sub-leagues:
RoboCup Soccer Simulation 2D League
The 2D Simulation League is one of the oldest and most established RoboCup Soccer leagues. In this modality, two teams, each composed of eleven autonomous software programs (called agents), compete in a two-dimensional virtual soccer stadium. A central server, known as SoccerServer, manages the game, including the positions of all players and the ball, as well as the game physics.
Each player agent receives relative and noisy input from its virtual sensors (visual, acoustic, and physical), mimicking real-world sensor limitations. Based on these inputs, agents must decide and perform basic commands such as dashing, turning, or kicking to influence their environment. The core challenge in the 2D league lies in intelligently inferring the best possible action from incomplete and noisy sensor data within a strict 100 ms time slot per game cycle. This makes it an excellent testbed for research in multi-agent systems, artificial intelligence, and machine learning, particularly in areas like world modeling and strategic decision-making under uncertainty.
RoboCup Soccer Simulation 3D League
The 3D Simulation League significantly enhances the realism of the simulated environment by adding a third dimension and more complex physics. This league challenges software agents to control humanoid robots, such as the Nao robot model (currently used), to compete in soccer matches within a detailed virtual world.
Initially, the 3D league focused on basic mobility and balance, as the first robot models were simpler. However, with the introduction of more complex humanoid models, the emphasis shifted towards low-level control of these robots and the creation of fundamental behaviors like walking, kicking, turning, and standing up. Robots in the 3D simulation are equipped with various virtual sensors, including gyroscopes, accelerometers, hinge joint perceptors, force resistance perceptors, and vision perceptors (camera), to perceive their environment and other players. They also have effectors to control their movements and actions.
The 3D league provides a robust platform for experimenting with humanoid robot control without the need for expensive physical hardware. It is a vital environment for research into multi-robot coordination methodologies, advanced locomotion, dynamic balance, and complex vision-based behaviors for humanoid robots. Solutions developed here directly contribute to the long-term goal of creating fully autonomous humanoid robots capable of complex physical tasks in real-world scenarios.
Research and Development Areas
Both 2D and 3D Simulation Leagues contribute to key areas of robotics and artificial intelligence research:
Multi-agent Systems: Developing coordinated behaviors among multiple autonomous entities.
Artificial Intelligence: Implementing advanced decision-making, learning, and strategic planning algorithms.
Robotic Control: For 3D, focusing on the low-level control and balance of humanoid robots.
Sensor Fusion and Perception: Handling noisy and incomplete sensor data to build a coherent understanding of the environment.
Reinforcement Learning: Training agents to learn optimal behaviors through trial and error in complex dynamic environments.
Importance for Industry and Society
The RoboCup Soccer Simulation League serves as a critical testbed for theoretical advancements in AI and robotics. The insights gained and technologies developed in these virtual environments have broad applicability, influencing areas such as:
Autonomous Systems: Development of intelligent control for self-driving vehicles and drones.
Logistics and Automation: Optimizing multi-robot systems in warehouses and factories.
Disaster Response: Designing coordinated robot teams for search and rescue operations in dangerous or inaccessible areas.
Human-Robot Interaction: While less direct than RoboCup@Home, the multi-agent coordination can inform future human-robot team dynamics.
Conclusion and Future Impact
The RoboCup Soccer Simulation League is more than just a competition; it is a driving force for innovation in artificial intelligence and robotics. By providing a challenging yet safe platform, it enables researchers and students to push the boundaries of what autonomous software agents can achieve. The advancements made in both the 2D and 3D sub-leagues are fundamental to realizing the potential of AI in solving complex real-world problems and bringing intelligent autonomous systems closer to everyday life.










{kind=link}